I asked my Twitter followers if they knew that the softmax function is linear. The result was disbelief.
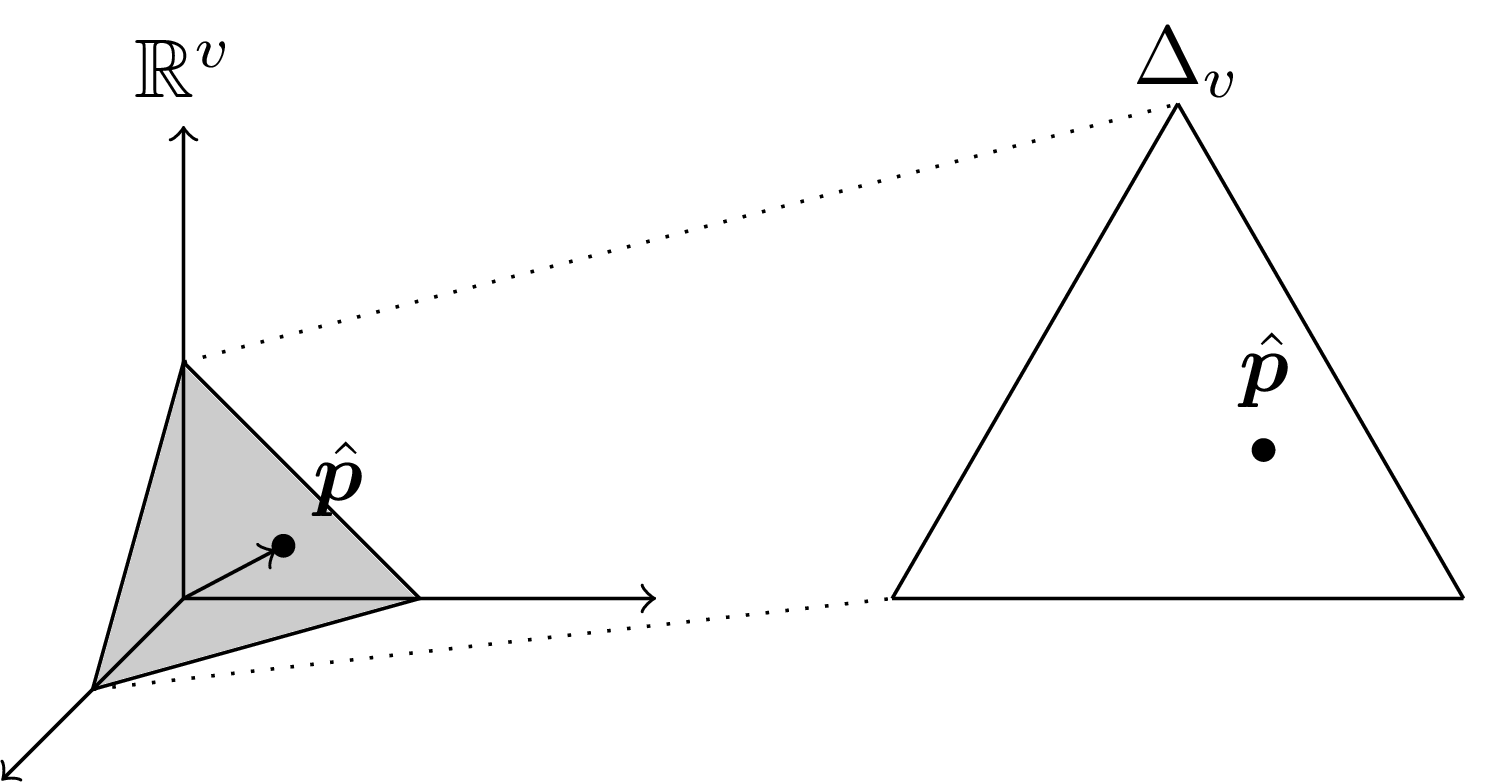
In this post, I’ll give a short proof that the softmax function is a linear map from real vectors of \(d\) dimensions (\(\mathbb{R}^d\)) to probability distributions over \(d\) variables (\(\Delta_d)\). I will assume some basic understanding of linear algebra. We will begin by defining both the softmax function and linear maps.
\[\mathrm{softmax}(\vec{x})=\frac{\exp\vec{x}}{\sum_i\exp x_i}\]
To prove that the softmax funtion is a linear map, we will therefore need to show
\(\mathbb{R}^d\) is a canonical vector space, where vector addition is defined as \[(u_1,u_2,\ldots,u_d)\oplus_{\mathbb{R}^d}(v_1,v_2,\ldots,v_d)=(u_1+v_1, u_2+v_2, \ldots, u_d+v_d)\] and scalar multiplication as \[\lambda\otimes_{\mathbb{R}^d}(u_1,u_2,\ldots,u_d)=(\lambda u_1,\lambda u_2, \ldots,\lambda u_d).\] For convenience, we will denote \(\vec{u}\oplus_{\mathbb{R}^d}\vec{v}\) as \(\vec{u}+\vec{v}\), and \(\lambda\otimes_{\mathbb{R}^d}\vec{u}\) as \(\lambda\vec{u}\), as this is common notation for vector arithmetic in \(\mathbb{R}^d\).
It is an underappreciated fact that \(\Delta_d\) is also a real vector space. In particular, the elements of \(\Delta_d\) are \(d\)-dimensional tuples of positive reals whose entries sum to 1 \[\Delta_d=\left\{\vec{u}\in(0,\infty)^d \mid \sum_{i=1}^du_i=1\right\}.\]
To add two vectors \(u,v\in\Delta_d\), we multiply them element-wise and divide by their sum \[\vec{u}\oplus_{\Delta_d}\vec{v}=\frac{\vec{u}\odot\vec{v}}{\sum_{i=1}^du_iv_i}.\] To multiply a vector \(\vec{u}\in\Delta_d\) by a scalar \(\lambda\in\mathbb{R}\), we exponentiate elements by \(\lambda\) and renormalize \[ \lambda\otimes_{\Delta_d}(u_1,u_2,\ldots,u_d) =\frac{(u_1^\lambda,u_2^\lambda,\ldots,u_d^\lambda)}{\sum_{i=1}^du_i^\lambda}. \] For convenience, we will denote these operations as \(\oplus\) and \(\otimes\), dropping the subscript.
Our goal is to show that for all vectors \(\vec u,\vec v\in \mathbb{R}^d\) \[\mathrm{softmax}(\vec u+\vec v)=\mathrm{softmax}(\vec u)\oplus\mathrm{softmax}(\vec v).\] Jumping right in, \[\begin{aligned} \mathrm{softmax}(\vec u + \vec v) &= \frac{\exp(\vec u+\vec v)}{\sum_{i=1}^d\exp(u_i+v_i)} & \text{softmax defn}\\ &= \frac{\exp(\vec{u})\odot\exp(\vec{v})}{\sum_{i=1}^d\exp(u_i)\exp(v_i)} & \text{exp identity} \\ &= \frac{\exp(\vec{u})}{\sum_{i=1}^d\exp(u_i)}\oplus\frac{\exp(\vec{v})}{\sum_{i=1}^d\exp(v_i)} & \oplus\text{ defn} \\ &= \mathrm{softmax}(\vec{u})\oplus\mathrm{softmax}(\vec{v}) & \text{softmax defn.} \end{aligned}\]
Our goal is to show that for all vectors \(\vec u\in \mathbb{R}^d\) and \(\lambda\in\mathbb{R}\), \[\lambda\otimes\mathrm{softmax}(\vec u)=\mathrm{softmax}(\lambda\vec u).\] By a similar derivation, \[\begin{aligned} \lambda\otimes\mathrm{softmax}(\vec u) &= \lambda\otimes\frac{\exp(\vec{u})}{\sum_{i=1}^d\exp(u_i)} & \text{softmax defn}\\ &= \frac{\exp(\vec{u})^\lambda}{\sum_{i=1}^d\exp(u_i)^\lambda} & \text{$\otimes$ defn}\\ &= \frac{\exp(\lambda\vec{u})}{\sum_{i=1}^d\exp(\lambda\vec{u})_i} & \text{exp identity}\\ &=\mathrm{softmax}(\lambda\vec u) & \text{softmax defn.} \end{aligned}\]
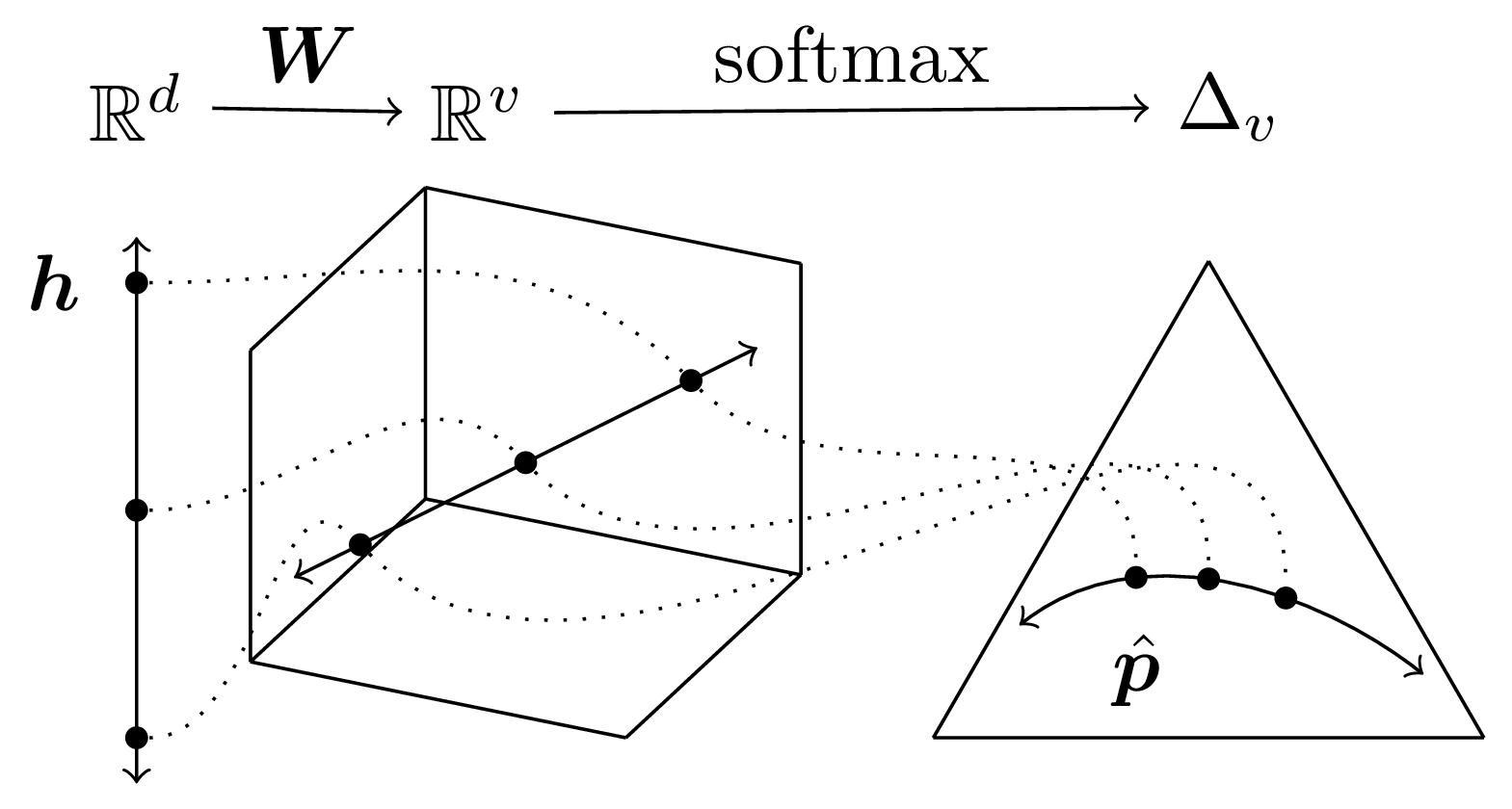
Having shown additivity and homogeneity we have proven that the softmax function is a linear map! Why is this important? For one, this knowledge can give us intuition for how the softmax bottleneck limits the possible outputs of language models.
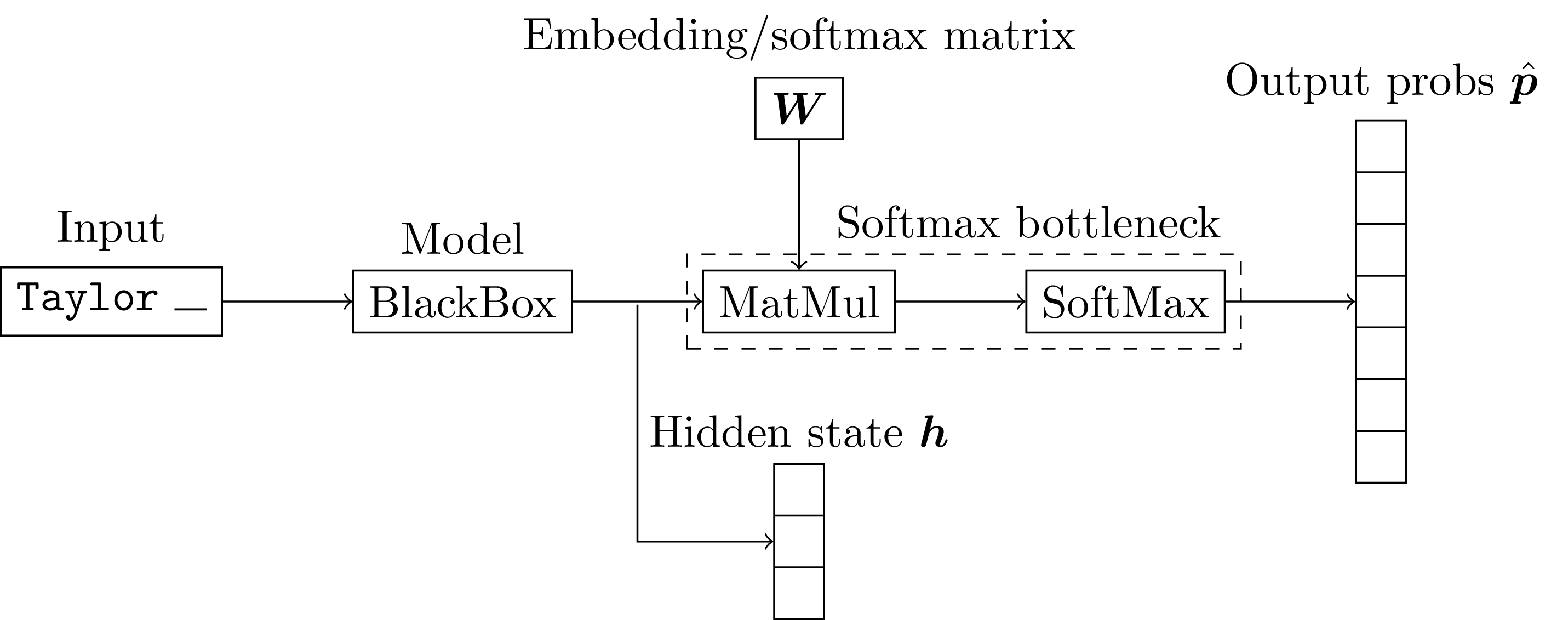
In my recent paper, we use this knowledge to develop a better generation algorithm for language models that directly addresses this source of model errors.
Thank you for reading! For questions and comments, you are welcome to email me at mattbnfin@gmail.com.